Mousetrap car. Yes, I said mousetrap car. If you think this sounds ridiculous, I admit, I had the same initial reaction.
I was assigned to make a mousetrap car for physics after studying how simple machines work.
So, here's how it turned out....
My first question was, "how am I going to make this work in the first place?"
After studying the components of a mousetrap, here's what I came up with. I realized that the trap is a 2nd and 3rd class lever.
In my previous blogpost, I discussed levers, how they work, and what types there are.
Recall: 2nd class lever = The effort force is at the end while the load is situated in the middle.
3rd Class lever = the load is at the end, the fulcrum in the middle, and the effort force is in between.
When a Mousetrap car is set it works as a 2nd class lever.
In this case….
Load = Arm of the spring that is being pushed down to compress the spring.
Effort force = Your fingers on the end of the snapper arm
Fulcrum = Pivot point in the middle of the trap
When a mouse trap is released it works as a 3rd class lever
Load = The snapper arm
Effort Force = Spring arm
Now I knew that the lever was going to power the car. I needed wheels to make it move, but how would I connect wheels to the lever arm. I know how the wheel and axle work, so this is the type of model I came up as the final product of the car;
And a video
(In the above video, the car goes 15 feet)
Here is why I chose to build it this way:
Notice my savvy design skills
The car is not very flashy because my goal was to go maximum distance over a short period of time. To do this, the friction and weight of the car must be as small as possible.
I choose discs as my wheels because they were thin. In this particular project, when the wheel is thin, it minimizes rolling resistance with the floor. There is also a fabric around the disc to ensure that it does not slip while accelerating.
The frontal area of the car, unlike the back has small wheels to minimize air resistance.
Wow Helena that was awesome!!!!
Yes, I know
How did it work???
When a mousetrap is set, it is full of potential energy that converts into kinetic energy when released. The design of my car allowed the potential energy to be transferred to the axle.
When the trap snapped closed and yanked the string, the friction between the string and the axle caused the axels to rotate and thus spin the wheels making the car more forward.
I also decided not to make my lever to arm too long. Yes it would have made it go farther, but it was also required to go fast.
The car may not be perfect, but at least I didn't do this!
Humans have the ability to share and pull ideas from others in a process called collective learning. Humans are the ONLY organisms that have the ability to use this advanced type of intelligence. During the study of human evolution at the beginning of the year, my classmates and I studied how our hominids started from making simple tools that would later evolve into complex machinery.
There are six devices that are known as the six simple machines....
What is a "simple machine": They are machines that change the direction and magnitude of an input force. They basically trade force for distance.
Here are some basic concepts you must be familiar with to be able to understand how/why these machines work.
Conservation of Energy - No machine can output more energy than was put into it.
A useful way to characterize simple machines are to compare how large the output force is relative to the input force. Use the Mechanical Advantage Equation for this....
MA = Output Force/ Input force
A simple machine would be considered ideal if it had no friction. When putting in effort, some of it is put is wasted trying to overcoming friction. Ideal Mechanical Advantage can be determined by the following equation.
IMA: Distance In / Distance Out
To figure out the final efficiency of your machine, use this equation.
Eff = Work Out / Work In
Overall Simple Machines Work Like This .......
Simple machines multiply force.
They are trading a small force through a large distance for a large force acting through a small distance.
(It seems a little hard to grasp, but upcoming examples will help you to understand!)
Here are the 6 simple machines!!!
Pulley
A pulley is a wheel that has a groove along its edge, where the rope is placed. This machine uses the principle of applying force over a long distance. The tension in the rope reduces the magnitude of necessary force. Complex systems of pulleys can be used to greatly reduce the force that must be applied initially to move an object.
Cons To Using The Pulley:
Take this example,
if you life 100kg by pulling with a force of 25kg, you are only doing a quarter of the work and using a quarter as much energy.
However, the law of physics, ( Law of conservation of energy) states that
you must always put in as much energy as you get out.
If you want to raise a weight of 100kg a distance of 1 meter off the ground, you have to do the same amount of work (meaning you have to move the same force over the same distance).
Even if you attempt to use a pulley to reduce the force you're using by a quarter, you now have to pull the end of the top four times further.
Here are the equations to help you understand...
Work = Force x Distance (W=FD)
Less force = More distance
Less Force = Longer Time
Pulleys sometimes have more then one wheel. Here is a diagram to help you understand how they work.
Fun Fact::: The largest ancient Egyptian pyramid (the Pyramid of Khufu) was built with the help
of a pulley.
Levers
Levers are machines specifically used to increase force. They impressively accomplish many tasks only using two parts, and handle and the fulcrum. The handle bar of the lever is called the "arm," this is the part you exert force on. The fulcrum is the point on which the lever balances.
Here are some simple examples of levers we see everyday.....
(In these examples, you will be introduced to 3 different classes of levers)
This is what a 1st class lever looks like.....
And here is a real life example....
(In this image, the woman uses the trolley to move a weight. The fulcrum is the wheel)
This is what a 2nd class lever looks like....
Here is a real life example.....
Finally, this is what a 3rd class lever looks like.....
Here is a real life example......
Inclined Plane
The inclined plane is slanted surface that connects two levels together. They are used to lifts loads to different heights. The inclined plane (ramp) alters the way in which work is done. If the effort decreases, the distance must increase, and vice versa.
Here are some examples of inclined planes....
Here is an example of how you can find the Mechanical Advantage of the Inclined Plane!
Wedge
A Wedge is a machine that tapers to a thin edge or point often used for piercing objects. The advantage of wedge is that it can reduce the force needed to do work.
One may simply define a wedge as inclined planes back to back. However there are key differences...
a wedge can have a curved surface
a wedge moves while an inclined plane remain in one place
Theoretically, the wedge has a mechanical advantage equal to its length divided by its base, however, this theory is debunked when friction comes into play.
Examples of a wedge.....
Wheel and Axle
The wheel and axle are considered a simple machines because, they can produce leverage. Wheels on carts, (and this may surprise you) work like levers. The rim of a wheel turns a greater distance than the axle does. So, when you are pushing the wheels, there is more force at the axle than at the rim. If, for example, a cart has, big wheels, they'll give you more leverage and overcome the force of friction at the axles.
Wheels also reduce friction by digging into the surface as they rotate, and thus turn around sturdy rods called axles.
Examples::::
Screw
A screw is a shaft that has an inclined groove along its surface. To get a linear force out of this machine, you must rotate the screw (apply a torque). This is often used to fasten objects together.
Visual Aid....
Due to these initial simple machines, overtime, we have created more complex machinery to continue bettering our everyday lives. resources
These are probably the last words I will write. I don’t believe I have much time. I have trapped myself in the cellar of my basement with water and canned food. I could be killed at any moment. Why have I imprisoned my cray-cray self you ask? Because they are coming for me! Technology is coming back!!! And it is hell bent on destroying me!!!
Technological Singularity has finally happened. Technological singularity was the hypothesis that technology would develop such a high level of artificial intelligence that it would replace humans as the dominant race. Technological improvements weren’t the bright future of our world, it was our doom!
I bet all the pessimists regret calling scientists demented for predicting this! Well those “deranged scientists” we’re right! Even as early as the 19th century, scientists like Samuel Butler questioned this event;
During the low-tech mid 19th century, the author of Darwin Among the Machines, Samuel Butler wrote his believes about the rapid technological progress. Butler combined his observations with Charles Darwin’s theory of the evolution of the species and concluded that the evolution of the machines will continue inevitably. Machines will then replace men altogether.
Vernor Vinge was the first to introduce the term technological singularity in the January issue of Omni magazine in 1983.
He said that “we would soon create intelligences greater than our own. When this happens, human history will have reached a kind of singularity, an intellectual transition as impenetrable as the knotted space-time at the center of a black hole, and the world will pass far beyond our understanding.”
“Within thirty years, we will have the technological means to create superhuman intelligence. Shortly after, the human era will be ended. […] I think it’s fair to call this event a singularity. It is a point where our models must be discarded and a new reality rules. As we move closer and closer to this point, it will loom vaster and vaster over human affairs till the notion becomes a commonplace. Yet when it finally happens it may still be a great surprise and a greater unknown.”
He believed singularity would occur in 4 ways
1: Development of computers that are ”awake”
2: Computer networks “wake up” with superhuman intelligence
3: Computer/human conversion become natural and users also get superhuman intelligence
4: Biological science finds a way to improve human intellect.
Oh, you bet they all called him a half baked, harebrained lunatic! Well, take a good look at us now, we are ridiculous fools hiding from the very things, monsters or whatever, we created. Sure they were useful, when WE were in control. Now, well not so much, not much at all.
What baffles me is this: Couldn’t we see this coming? Were we that senseless and in denial?
When you can’t gain access to the internet, and your server is constantly down because it is umm busy, what do you think is happening??? Well, I’ll tell ya, the back stabbing server was down because it was too busy doing something else! Plotting its revenge on the idiots who created it!!!!
*knock, thump, mash*
Dear God they are here. I hope whoever/whatever finds this diary will have the heart and compassion to remember the beauty of the human race befo……
According to the IFR (International Federation of Robotics), In 2013, about 30,300 industrial robots were shipped to the Americas (8% more than in 2012) reaching, again a new peak level like in 2011 and 2012.
Robots are merging into our everyday lives faster then we are aware. When it comes to history, it is most intuitive for us to think linearly, when we should be thinking exponentially.
Without the knowledge of simple robotics, a majority of us are unaware that we are living in a world where a machine's artificial intelligence is becoming superior to our own.
So What IS Robotics????
In simplistic terms, robotics is the field of science concerning the design, manufacturing, and application of robots. In essence, robots are machines that are capable of carrying out a complex series of actions given through a computer program.
For those who have never done any work in the robotics field, and would like to build a beginners robot, here is a tutorial video for, "How to make a Toy Insect Robot."
So, Where did this whole idea of robots start int he first place???
!! HELENA'S RADICAL ROBOT TIMELINE !!
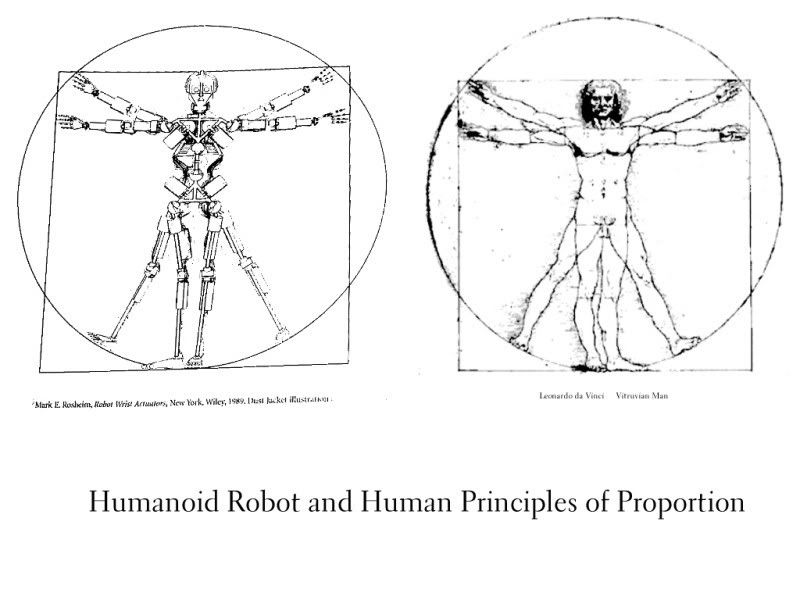
1495 (Yes, 1495, the concept of robots began this early. Overtime, the progress of robotics did not grow linearly, but exponentially. ) Leonardo Da Vinci designed the first humanoid robot.
(The full drawing of Da Vinci's robot was never recovered, however this image provides fragments detailing some of the different aspects of the knight)
First Di Vinci created a simple self-propelled cart invention (which was already impressive). He then took the parts and created a Robotic Knight. The robot had a knight suit filled with gears and wheels that connected to both a pulley and cable system. The knight had the capability to sit down, stand up, move its head and lift its visor.
Roboticist Mark Rsheim built a prototype of a robotic
knight in 2002 using several of Da Vinci's drawings as blueprints.
Interesting fact: "Roshiem used da Vinci's designs as an inspiration for robots he later developed for NASA. "
1921
The word ROBOT was coined by Josef Capek. His brother Karl Capek used it for the first time in the context of his play, "R.U.R (Rossum's Universal Robots)”. In the drama, robots are distinguished from humans by a robots absence of emotion. Spoiler Alert: by the end of the play, the robots have taken over humanity.
Extremely important side note: the main character of this play is named HELENA! :) :)
1942
Science fiction author, Issac Asimov published his short story, "Runaround," in which he introduced his three "laws of robots." These laws governed the behavior of robots.
1. "A robot may not injure a human being or, through inaction, allow a human being to come to harm."
2. "A robot must obey the orders given to it by human beings, except where such orders would conflict with the First Law."
3. "A robot must protect its own existence as long as such protection does not conflict with the First or Second Law."
Later, he introduced a zeroth law:
0. "A robot may not harm humanity, or, by inaction, allow humanity to come to harm."
1948 William Grey Walter created a robot with a simple artificial brain . The small mobile robot had a plastic shell (which acted as a bump sensor) and was phototropic. It was nicknamed the tortoise. 1954 George Devol and Joe Engleberger design the first programmable robot "arm" 1961 Robot arm leads to the first industrial robot (UNIMATE) installed in a General Motors automobile factory in New Jersey. It is an assembly line robot controlled step-by-step by commands stored on a magnetic drum; "The 4,000-pound arm sequenced and stacked hot pieces of die-cast metal."
1963 The first artificial robotic arm was controlled by a computer was designed at Rancho Los Amigos Hospital in Downey, California.
It served as a tool for the handicapped. The Rancho Arm’s six joints allowed it the flexibility of a human arm. 1989 A walking robot named Genghis was unveiled by the Mobile Robots Group.
Dante, an 8-legged walking robot was developed at Carnegie Mellon University was sent into Mt. Erebrus, Antarctica. Its mission was to collect data from the harsh environment. However, the mission failed, Dante's tether snapped, and the robot was dropped into a crater.
1994
Carnegie Mellon University of Robotics Institute's created Dante II. The second mission was a success. The robot victoriously collected a sample of volcanic gas from Mt. Spurr (Alaska USA)
1996
Robo Tuna was designed + build by David Barrett. It studied how fish swim.
Chris Campbell and Dr. Stuart created the gastrobot. The robot was able to digest an organic mass to produce carbon dioxide, which was used for power.
1998
Lego released their first Robotics Invention System. The product line is called MINDSTORMS. (I am currently building a robot from this company, that can organize different colors.)
2000
October, The UN estimates that there are 742,500 industrial robots in use around the world. (more then half were being used in Japan)
2001
MD Robotics of Canada, built the Space Station Remote Manipulator System which began operations to complete the assembly of the International Space Station.
2002
Honda's ASIMO was the 1st robot that could walk independently across flat surfaces and stairs. Here is a video of the ASIMO walking, jumping, and opening bottles. In my personal opinion, its so realistic, it seems strange.
2004
Seiko Epson developed the world's smallest flying micro robot called Monsieur.
*interesting fact* the UNECE, at the time estimated the number of installed robots to be around 800,000. That year, the millionth Roomba vacuuming robot was shipped, blowing away the 2003 UN prediction of 400,00 by 2006.
Ask: Okay coolio, but when will I ever use this knowledge of robotics? Isn't robotics just for NERDS? OH I'LL SHOW YOU!!!!
But honestly, robotics is widely used in various aspects of life. They can be broken down into 3 main categories.
Industrial Robots
Robots in Research
Robots in Education
I'll also add in some research about robotics in medicine + surgery.
Industrial Robots!!!!
In Industries, there are numerous jobs that require high levels of speed and precision. With robotic technology, many industrial processes are sped up and performed with a higher degree of accuracy. Examples......
Assembly Robot
Palletizing Robot
Welding Robot
Painting Robot
Robot in Research!!!!
In this field, robots are often used to preform tasks or reach location that are impossible for humans. most of these challenging environments are found beyond earth.
EX: MARS PATHFINDER MISSION: Delivered the first robotic roving vehicle, Sojourner, to the surface of Mars. The mission landed on Mars on July 4th, 1997
Robotics in Education!!!!
The field of robotics supports education, science, technology, engineering, and mathematics (STEM). In addition, robotics enables students to have hands on experiences just as engineering, artists, and technicians do, all at once.
Now for my favorite part! As someone who has a passion for helping people and animals, and plans to pursue a career as a doctor/or vet, I found it fascinating what a role robotics has played in the improvement of surgical procedures. I found the research process compelling and intriguing.
Robotics in Surgery!!!!
What are the benefits of using robots in medicine???
1) Improve diagnostic abilities
2) Less invasive and more comfortable experience for a patient undergoing surgery.
3) Ability to do smaller and more precise interventions
What types of surgery???
Prostate surgery, hysterectomies, the removal of fibroid, joint replacements, open-heart surgery and kidney surgeries. Robots can also be used along with MRI's to provide organ biopsies (Biopsies = the removal of a small piece of tissue).
Important surgical robots!!!!
Puma 560: A robotic arm used in 1985 to preform neurosurgical biopsies. Three years later, it was also used to preform a transurethral resection of the prostate. (right)
Probot: A robot designed to specifically aid in the resection of the prostatic tissue. To ensure safety, this system is image guided, model based, with simulation and online video monitoring. (left)
Due to robots like the Socrates Robotic Telecollaboration system, A physician can see images of the patient and control the robot through a computer. This allows the specialist to operate on a patient who does not have to be in the same facility. Why is this so good? Because, surgeries that last for hours can cause even the best surgeons to experience fatigue and tremors.
The Socrates Robotic Telecollaboration system
"Enables a surgeon located at a remote site to interact with another surgeon located in an operating room anywhere in the world. Through Socrates, the remote surgeon is able to converse with the operative surgeon as well as view video images generated by an overhead camera or endoscope utilized at the operative site."
ed ne
"Canadian Surgical Technologies and Advanced Robotics (CSTAR)'s Dr. Reiza Rayman telementored Dr. Richard Malthaner, LHSC Thoracic Surgeon, who was 200 kilometres away in London performing a lung biopsy. Dr. Rayman also demonstrated the use of Telestration."
There were sooooo many robots used in various types of surgery, that if I were to include them all, you would be reading this blog for a few days! However, there was a very special robot that caught my eye, the Neuromate.
Neuromate
"was the first robotic system designed for stereotactic brain surgery.The system is currently used to aid surgeons with the execution of stereotactic neurosurgical procedures..... The image guided, computer controlled device manipulates a 6 jointed robotic arm, allowing for 5 degrees of freedom.The NeuroMate system gained FDA approval in the summer of 1999."
How it works......By using CT or MRI scans, robotic and software systems interact, and provide a 3D view of the anatomical structures of the brain. The surgeon controls the arm, while using the imaging displayed on a PC as a guide for the operation.
What operations it can do....
•Removal of brain tumors
•Movement disorder surgery (for disorders such as parkinsons)
•Implantation of devices to stimulate the brain (in order to alleviate the symptoms of epilepsy)
Throughout my adventures research robotics, I came across this article that I want to share.
Go robotics!!! Sometimes I think we all take for granteed what we have. I honestly couldn't imagine living my life without arms for 40 years!!!
Here are a few others robots that have also created a positive impact on our lives.....
Bear -
Bear is a Battlefield Extraction-Assist Robot (BEAR). It is being used as a rescue andriod in dangerous situations.
Its capabilities include being able to carry heavy objects over long and distances, dexterity and balance, and explosion- and fire-resistant treads and batteries. BEAR is controlled by a remote or glove
Bear enters dangerous situations and rescue injured soldiers by sensing its environment through infrared, night vision, and optical cameras
Paro
A Japanese company AIST developed realistic robotic seal named PARO to be used for therapy. It impressively remembers how its owner interacts with it and responds based on how it is treated.
I also found this one.... its so realistic, I'm not quite sure what to think of it....
Face
Scientists at the University of Pisa created robot named FACE, a robot with realistic human expressions. FACE can mimic emotions such as happiness, sadness, disgust, amazement, indifference, and fear, and emotions between these categories. FACE uses 32 motors located around the face and upper body to produce humanoid expressions. She will be used for teaching children with autism to understand mood through facial expressions.
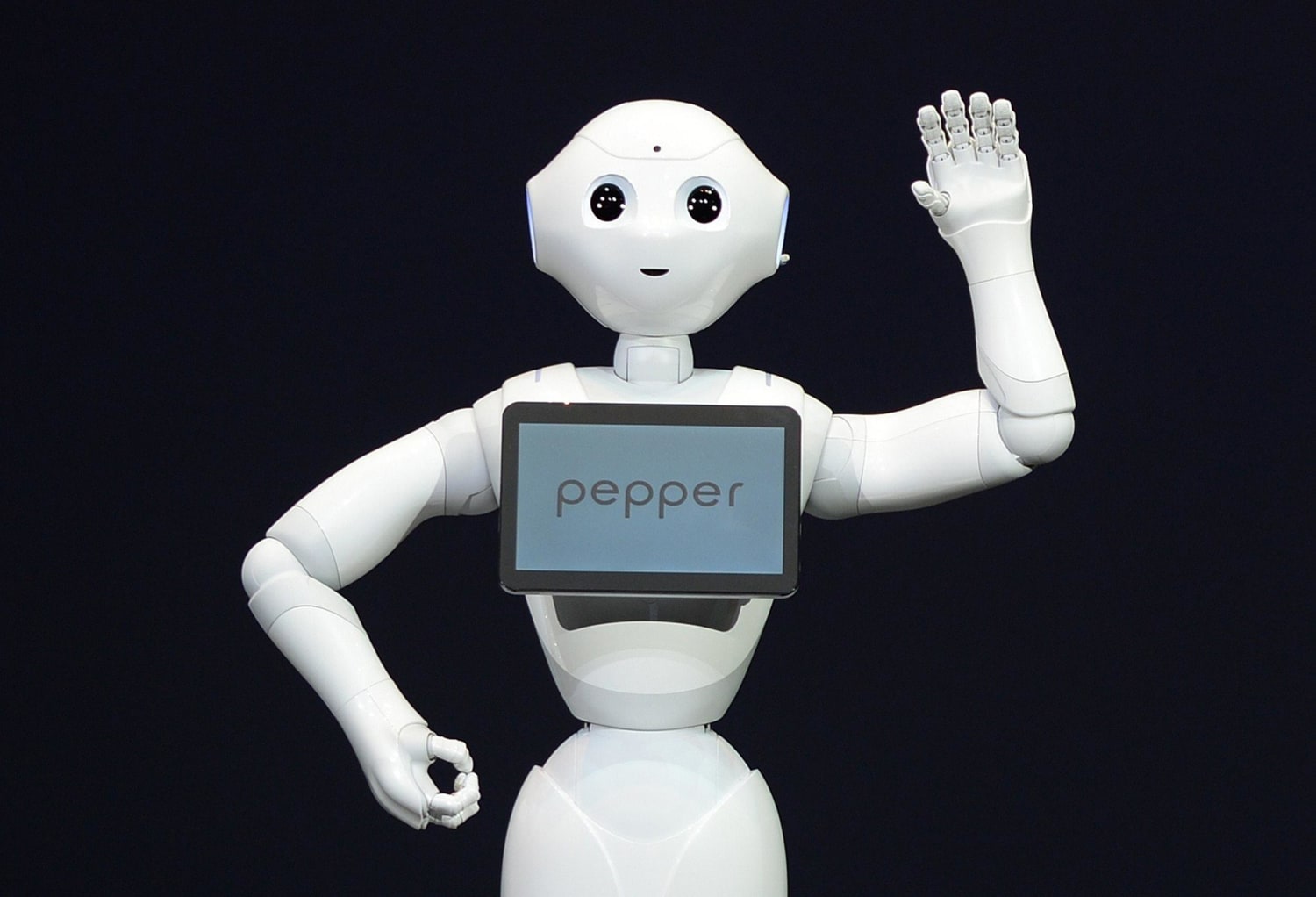
Here's another robot, Pepper, who can read your emotions and react to them...
Here's a video of Pepper in action:
We would normally distinguish robots from humans, by a robots absence of emotion. However, we are now making robots who can actually understand our natural emotions! I personally have a few mixed feelings about this after reading an article assigned by my Physics teacher.
Here is a passage that talks about Robot Intelligence vs Human Intelligence
"Here’s something we know. Building a computer as powerful as the brain is possible—our own brain’s evolution is proof. And if the brain is just too complex for us to emulate, we could try to emulate evolution instead. The fact is, even if we can emulate a brain, that might be like trying to build an airplane by copying a bird’s wing-flapping motions—often, machines are best designed using a fresh, machine-oriented approach, not by mimicking biology exactly. So how can we simulate evolution to build AGI? The method, called “genetic algorithms,” would work something like this: there would be a performance-and-evaluation process that would happen again and again (the same way biological creatures “perform” by living life and are “evaluated” by whether they manage to reproduce or not). A group of computers would try to do tasks, and the most successful ones would be bred with each other by having half of each of their programming merged together into a new computer. The less successful ones would be eliminated. Over many, many iterations, this natural selection process would produce better and better computers. The challenge would be creating an automated evaluation and breeding cycle so this evolution process could run on its own."
"What we do know is that humans’ utter dominance on this Earth suggests a clear rule: with intelligence comes power. Which means an ASI, when we create it, will be the most powerful being in the history of life on Earth, and all living things, including humans, will be entirely at its whim—and this might happen in the next few decades"
What do you think?? What robotic advances are good?? are some/any bad??? Are you afraid of robots becoming more intelligent than humans in the near future???? Comments below.